文章导航
1. LSM树概念
LSM-Tree全称是Log Structured Merge Tree,是一种分层,有序,面向磁盘的数据结构,其核心思想是充分了利用了,磁盘批量的顺序写要远比随机写性能高出很多。
围绕这一原理进行设计和优化,以此让写性能达到最优,正如我们普通的Log的写入方式,这种结构的写入,全部都是以Append的模式追加,不存在删除和修改。当然有得就有舍,这种结构虽然大大提升了数据的写入能力,却是以牺牲部分读取性能为代价,故此这种结构通常适合于写多读少的场景。故LSM被设计来提供比传统的B+树或者ISAM更好的写操作吞吐量,通过消去随机的本地更新操作来达到这个目标。这里面最典型的例子就属于Kakfa了,把磁盘顺序写发挥到了极致,故而在大数据领域成为了互联网公司标配的分布式消息中间件组件。
想要支持更复杂和高效的读取,比如按key查询和按range查询,就得需要做一步的设计,这也是LSM-Tree结构,除了利用磁盘顺序写之外,还划分了内存+磁盘多层的合并结构的原因,正是基于这种结构再加上不同的优化实现,才造就了在这之上的各种独具特点的NoSQL数据库,如Hbase,Cassandra,Leveldb,RocksDB,MongoDB,TiDB, clickhouse等。
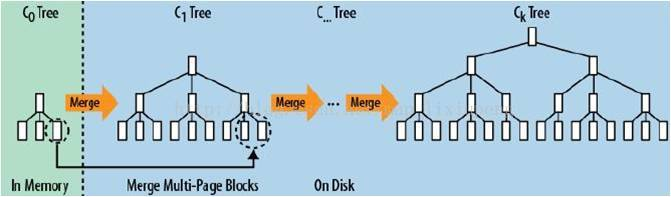
GFS的设计初衷就是希望通过添加新数据的方式而不是通过重写旧数据的方式来修改文件。而LSM-tree通过滚动合并和多页块的方法推迟和批量进行索引更新
磁盘的技术特性:对磁盘来说,能够最大化的发挥磁盘技术特性的使用方式是:一次性的读取或写入固定大小的一块数据,并尽可能的减少随机寻道这个操作的次数。
2. SSTable 和 LSM-Tree
提到LSM-Tree这种结构,就得提一下LevelDB这个存储引擎,我们知道Bigtable是谷歌开源的一篇论文,很难接触到它的源代码实现。如果说Bigtable是分布式闭源的一个高性能的KV系统,那么LevelDB就是这个KV系统开源的单机版实现,最为重要的是LevelDB是由Bigtable的原作者 Jeff Dean 和 Sanjay Ghemawat 共同完成,可以说高度复刻了Bigtable 论文中对于其实现的描述。
在LSM-Tree里面,核心的数据结构就是SSTable,全称是Sorted String Table,SSTable的概念其实也是来自于 Google 的 Bigtable 论文,论文中对 SSTable 的描述如下:
如上所述,SSTable是一种拥有持久化,有序且不可变的的键值存储结构,它的key和value都是任意的字节数组,并且了提供了按指定key查找和指定范围的key区间迭代遍历的功能。SSTable内部包含了一系列可配置大小的Block块,典型的大小是64KB,关于这些Block块的index存储在SSTable的尾部,用于帮助快速查找特定的Block。当一个SSTable被打开的时候,index会被加载到内存,然后根据key在内存index里面进行一个二分查找,查到该key对应的磁盘的offset之后,然后去磁盘把响应的块数据读取出来。当然如果内存足够大的话,可以直接把SSTable直接通过MMap的技术映射到内存中,从而提供更快的查找。

Flink PMC大佬Stefan Richter在Flink Forward 2018演讲的PPT
3. LSM树的合并策略及优劣比较
主要分为size-tiered compaction和leveled compaction
(1)size-tiered compaction与空间放大
size-tiered compaction的思路非常直接:每层允许的SST文件最大数量都有个相同的阈值,随着memtable不断flush成SST,某层的SST数达到阈值时,就把该层所有SST全部合并成一个大的新SST,并放到较高一层去。下图是阈值为4的示例。
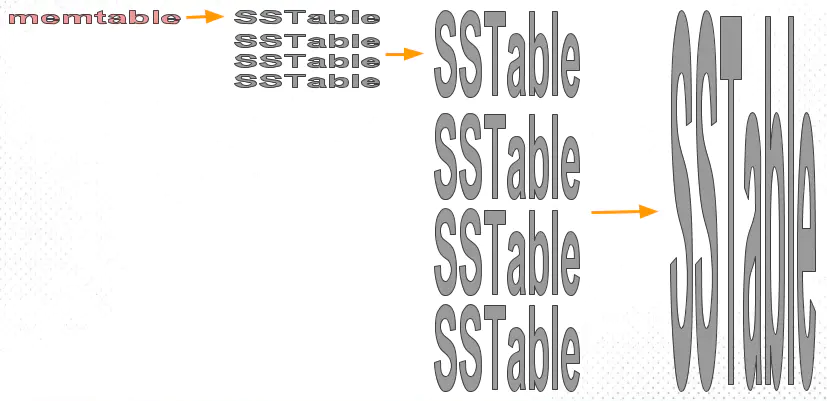
size-tiered compaction的优点是简单且易于实现,并且SST数目少,定位到文件的速度快。当然,单个SST的大小有可能会很大,较高的层级出现数百GB甚至TB级别的SST文件都是常见的。它的缺点是空间放大比较严重,下面详细说说。
所谓空间放大(space amplification),就是指存储引擎中的数据实际占用的磁盘空间比数据的真正大小偏多的情况。例如,数据的真正大小是10MB,但实际存储时耗掉了25MB空间,那么空间放大因子(space amplification factor)就是2.5。
为什么会出现空间放大呢?很显然,LSM-based存储引擎中数据的增删改都不是in-place的,而是需要等待compaction执行到对应的key才算完。也就是说,一个key可能会同时对应多个value(删除标记算作特殊的value),而只有一个value是真正有效的,其余那些就算做空间放大。另外,在compaction过程中,原始数据在执行完成之前是不能删除的(防止出现意外无法恢复),所以同一份被compaction的数据最多可能膨胀成原来的两倍,这也算作空间放大的范畴。
下面用Cassandra的size-tiered compaction策略举两个例子,以方便理解。每层SST个数的阈值仍然采用默认值4。
- 以约3MB/s的速度持续插入新数据(保证unique key),时间与磁盘占用的曲线图如下。

图中清晰可见有不少毛刺,这就是compaction过程造成的空间放大。注意在2000s~2500s之间还有一个很高的尖峰,原数据量为6GB,但在一瞬间增长到了12GB,说明Cassandra在做大SST之间的compaction,大SST的缺陷就显现出来了。尽管这只是暂时的,但是也要求我们必须预留出很多不必要的空闲空间,增加成本。
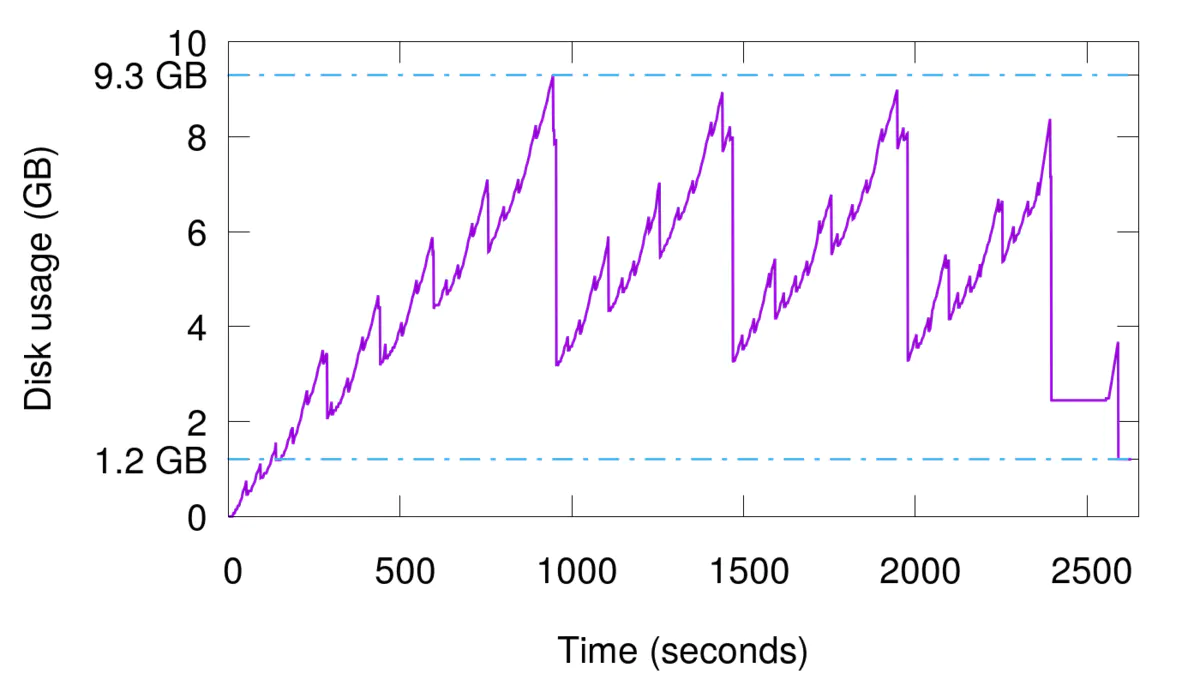
这种情况更厉害(写入重复的KEY数据),最高会占用多达9.3GB磁盘空间,放大因子为7.75。虽然中途也会触发compaction,但是最低只能压缩到3.5GB左右,仍然有近3倍的放大。这是因为重复key过多,就算每层compaction过后消除了本层的空间放大,但key重复的数据仍然存在于较低层中,始终有冗余。只有手动触发了full compaction(即图中2500秒过后的最后一小段),才能完全消除空间放大,但我们也知道full compaction是极耗费性能的。
接下来介绍leveled compaction,看看它是否能解决size-tiered compaction的空间放大问题。
(2)leveled compaction与写放大
leveled compaction的思路是:对于L1层及以上的数据,将size-tiered compaction中原本的大SST拆开,成为多个key互不相交的小SST的序列,这样的序列叫做“run”。L0层是从memtable flush过来的新SST,该层各个SST的key是可以相交的,并且其数量阈值单独控制(如4)。从L1层开始,每层都包含恰好一个run,并且run内包含的数据量阈值呈指数增长。
下图是假设从L1层开始,每个小SST的大小都相同(在实际操作中不会强制要求这点),且数据量阈值按10倍增长的示例。即L1最多可以有10个SST,L2最多可以有100个,以此类推。
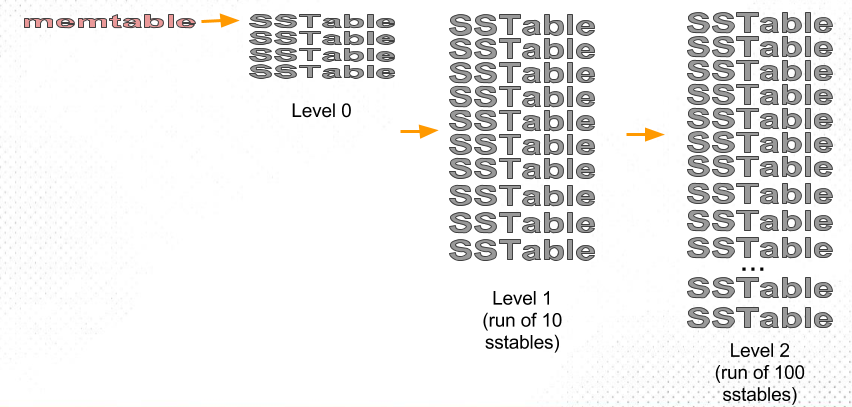
随着SST不断写入,L1的数据量会超过阈值。这时就会选择L1中的至少一个SST,将其数据合并到L2层与其key有交集的那些文件中,并从L1删除这些数据。仍然以上图为例,一个L1层SST的key区间大致能够对应到10个L2层的SST,所以一次compaction会影响到11个文件。该次compaction完成后,L2的数据量又有可能超过阈值,进而触发L2到L3的compaction,如此往复,就可以完成Ln层到Ln+1层的compaction了。
可见,leveled compaction与size-tiered compaction相比,每次做compaction时不必再选取一层内所有的数据,并且每层中SST的key区间都是不相交的,重复key减少了,所以很大程度上缓解了空间放大的问题。重复一遍上一节做的两个实验,曲线图分别如下。
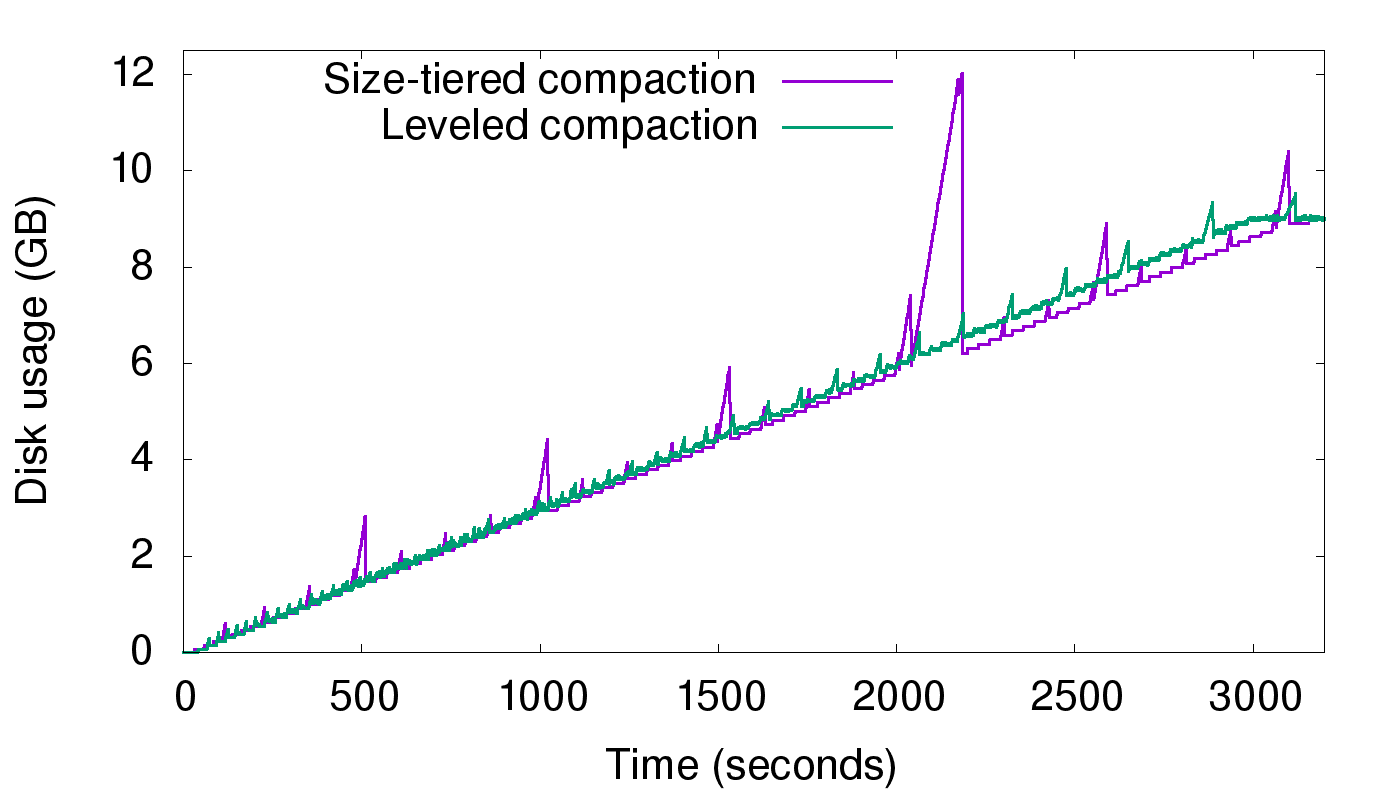
持续写入实验,尖峰消失了。
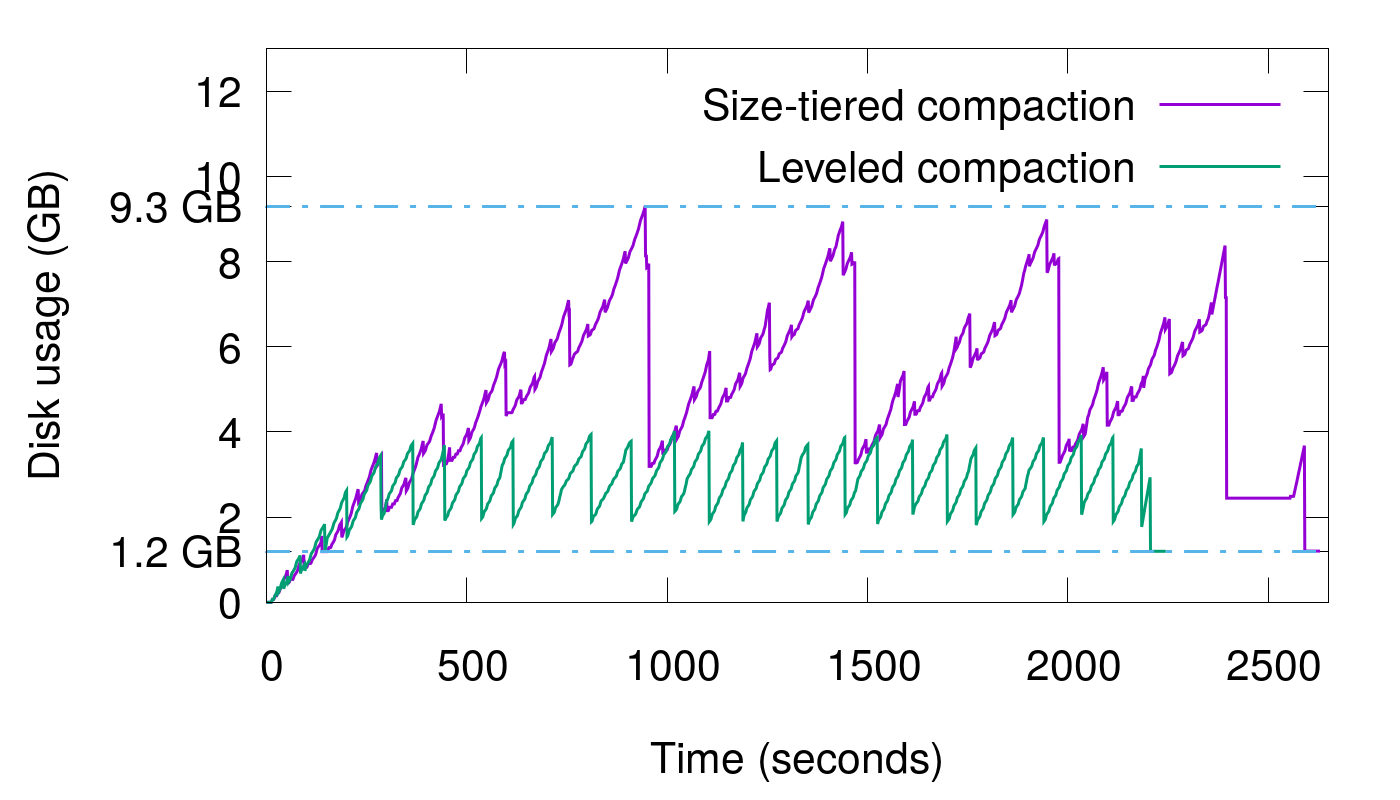
持续更新实验,磁盘占用量的峰值大幅降低,从原来的9.3GB缩减到了不到4GB。
但是鱼与熊掌不可兼得,空间放大并不是唯一掣肘的因素。仍然以size-tiered compaction的第一个实验为例,写入的总数据量约为9GB大,但是查看磁盘的实际写入量,会发现写入了50个G的数据。这就叫写放大(write amplification)问题。
写放大又是怎么产生的呢?下面的图能够说明。
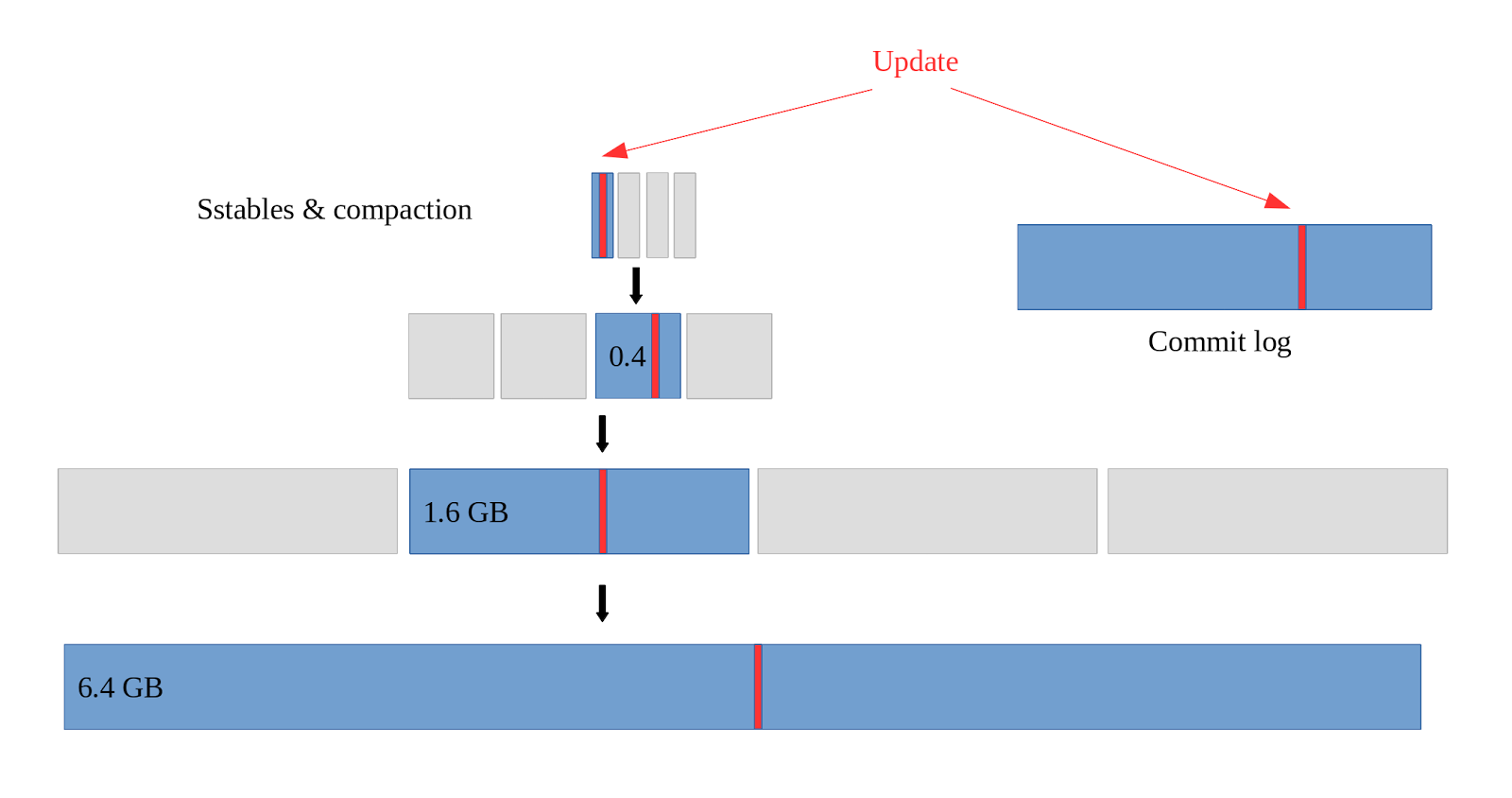
可见,这是由compaction的本质决定的:同一份数据会不断地随着compaction过程向更高的层级重复写入,有多少层就会写多少次。但是,我们的leveled compaction的写放大要严重得多,同等条件下实际写入量会达到110GB,是size-tiered compaction的两倍有余。这是因为Ln层SST在合并到Ln+1层时是一对多的,故重复写入的次数会更多。在极端情况下,我们甚至可以观测到数十倍的写放大。
写放大会带来两个风险:一是更多的磁盘带宽耗费在了无意义的写操作上,会影响读操作的效率;二是对于闪存存储(SSD),会造成存储介质的寿命更快消耗,因为闪存颗粒的擦写次数是有限制的。在实际使用时,必须权衡好空间放大、写放大、读放大三者的优先级。
(3)RocksDB的混合compaction策略
由于上述两种compaction策略都有各自的优缺点,所以RocksDB在L1层及以上采用leveled compaction,而在L0层采用size-tiered compaction。下面分别来看看。
leveled compaction
当L0层的文件数目达到level0_file_num_compaction_trigger阈值时,就会触发L0层SST合并到L1。
size-tiered compaction
universal compaction是RocksDB中size-tiered compaction的别名,专门用于L0层的
具体详情可以查看rocksdb的官方文档
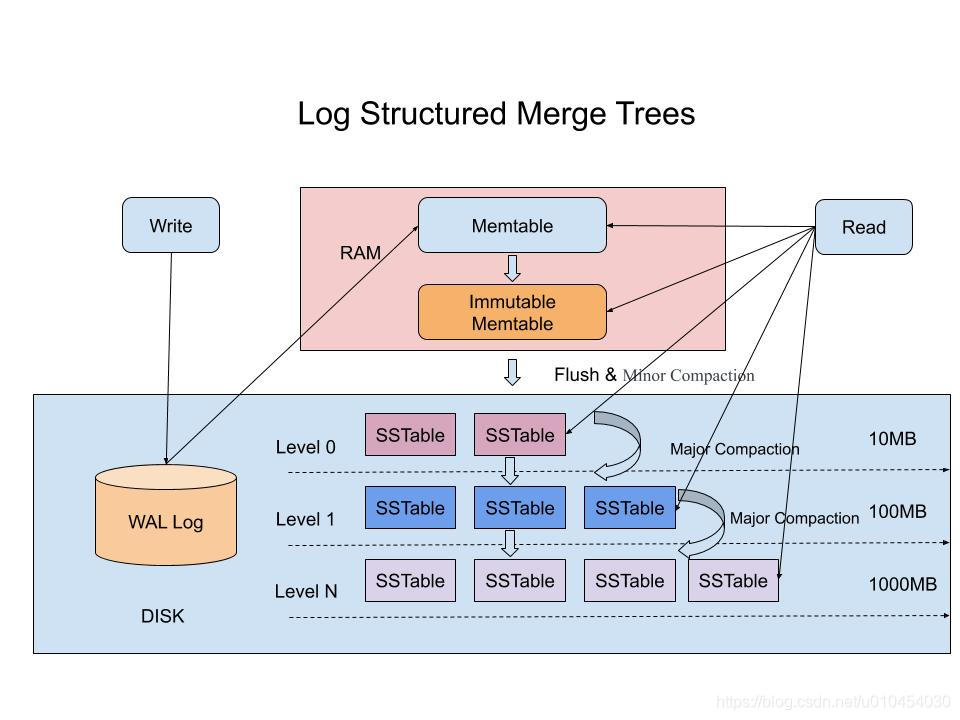
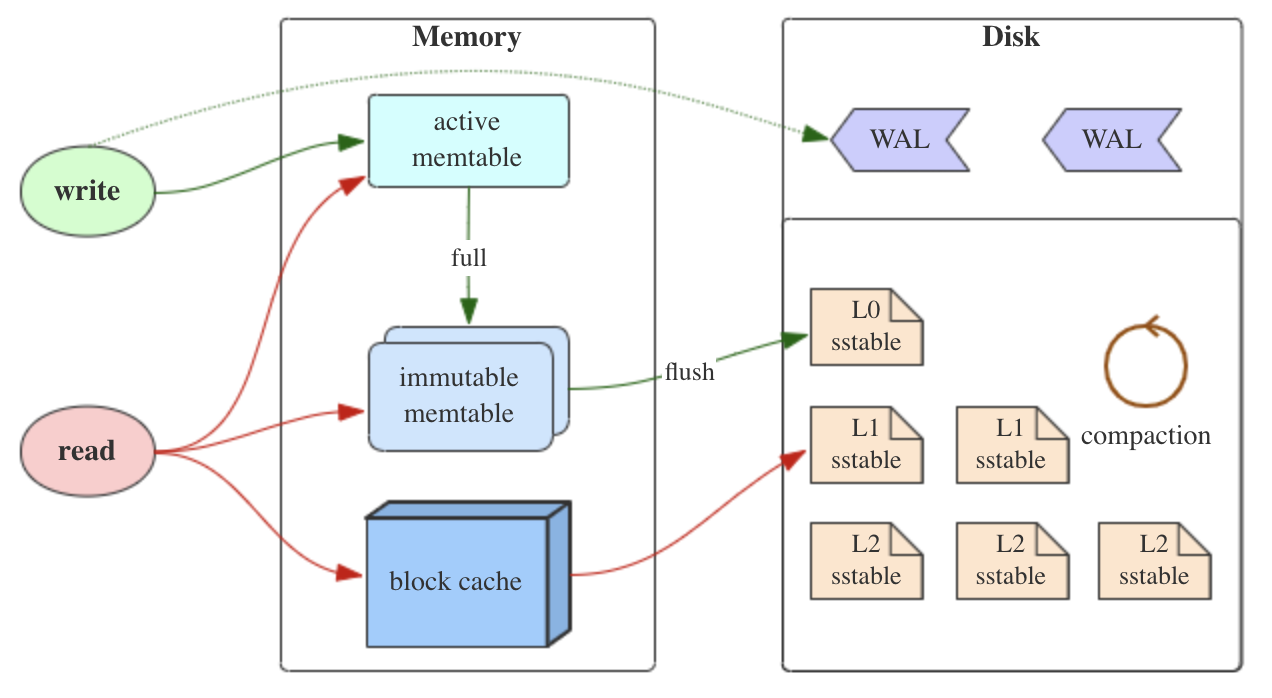
4. LSM树的数据读取和写入过程
我们总结下在在LSM-Tree里面如何写数据的?
1,当收到一个写请求时,会先把该条数据记录在WAL Log里面,用作故障恢复。
2,当写完WAL Log后,会把该条数据写入内存的SSTable里面(删除是墓碑标记,更新是新记录一条的数据),也称Memtable。注意为了维持有序性在内存里面可以采用红黑树或者跳跃表相关的数据结构。
3,当Memtable超过一定的大小后,会在内存里面冻结,变成不可变的Memtable,同时为了不阻塞写操作需要新生成一个Memtable继续提供服务。
4,把内存里面不可变的Memtable给dump到到硬盘上的SSTable层中,此步骤也称为Minor Compaction,这里需要注意在L0层的SSTable是没有进行合并的,所以这里的key range在多个SSTable中可能会出现重叠,在层数大于0层之后的SSTable,不存在重叠key。
5,当每层的磁盘上的SSTable的体积超过一定的大小或者个数,也会周期的进行合并。此步骤也称为Major Compaction,这个阶段会真正 的清除掉被标记删除掉的数据以及多版本数据的合并,避免浪费空间,注意由于SSTable都是有序的,我们可以直接采用merge sort进行高效合并。
接着我们总结下在LSM-Tree里面如何读数据的?
1,当收到一个读请求的时候,会直接先在内存里面查询,如果查询到就返回。
2,如果没有查询到就会依次下沉,知道把所有的Level层查询一遍得到最终结果。
思考查询步骤,我们会发现如果SSTable的分层越多,那么最坏的情况下要把所有的分层扫描一遍,对于这种情况肯定是需要优化的,如何优化?在 Bigtable 论文中提出了几种方式:
1,压缩
SSTable 是可以启用压缩功能的,并且这种压缩不是将整个 SSTable 一起压缩,而是根据 locality 将数据分组,每个组分别压缩,这样的好处当读取数据的时候,我们不需要解压缩整个文件而是解压缩部分 Group 就可以读取。
2,缓存
因为SSTable在写入磁盘后,除了Compaction之外,是不会变化的,所以我可以将Scan的Block进行缓存,从而提高检索的效率
3,索引,Bloom filters
正常情况下,一个读操作是需要读取所有的 SSTable 将结果合并后返回的,但是对于某些 key 而言,有些 SSTable 是根本不包含对应数据的,因此,我们可以对每一个 SSTable 添加 Bloom Filter,因为布隆过滤器在判断一个SSTable不存在某个key的时候,那么就一定不会存在,利用这个特性可以减少不必要的磁盘扫描。
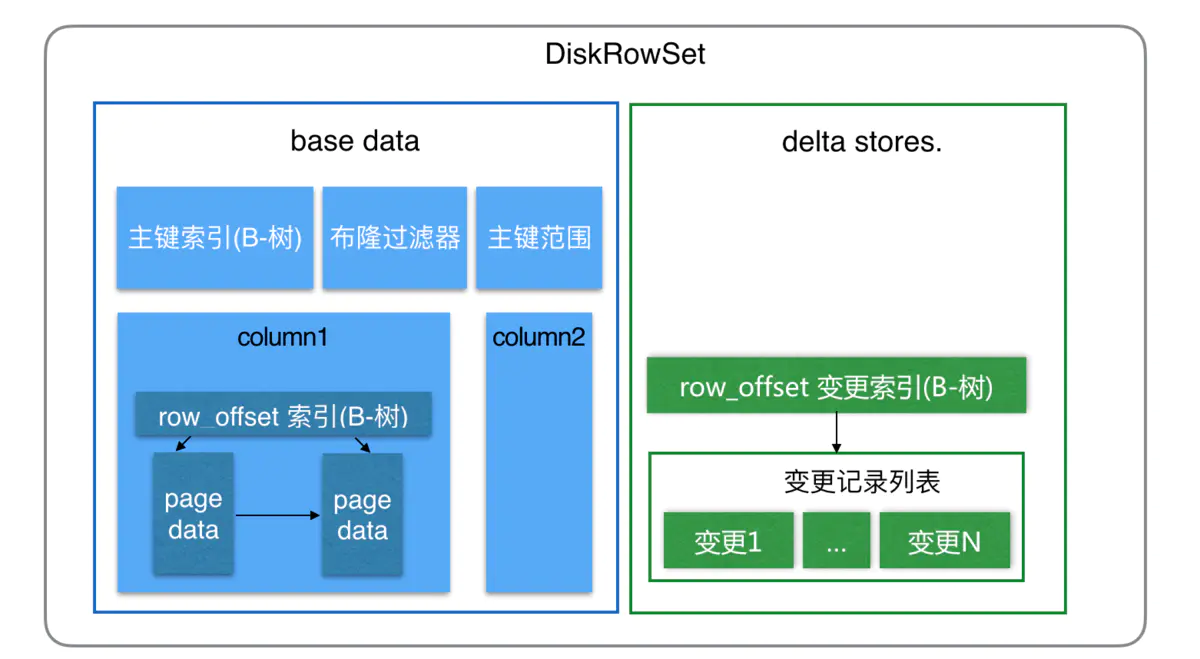
kudu中的DiskRowSet的索引和布隆过滤器使用
4,合并
这个在前面的写入流程中已经介绍过,通过定期合并瘦身, 可以有效的清除无效数据,缩短读取路径,提高磁盘利用空间。但Compaction操作是非常消耗CPU和磁盘IO的,尤其是在业务高峰期,如果发生了Major Compaction,则会降低整个系统的吞吐量,这也是一些NoSQL数据库,比如Hbase里面常常会禁用Major Compaction,并在凌晨业务低峰期进行合并的原因。
最后有的同学可能会问道,为什么LSM不直接顺序写入磁盘,而是需要在内存中缓冲一下? 这个问题其实很容易解答,单条写的性能肯定没有批量写来的块,这个原理其实在Kafka里面也是一样的,虽然kafka给我们的感觉是写入后就落地,但其实并不是,本身是 可以根据条数或者时间比如200ms刷入磁盘一次,这样能大大提升写入效率。此外在LSM中,在磁盘缓冲的另一个好处是,针对新增的数据,可以直接查询返回,能够避免一定的IO操作。
5. 结构层面的性能比较
B+Tree VS LSM-Tree
传统关系型数据采用的底层数据结构是B+树,那么同样是面向磁盘存储的数据结构LSM-Tree相比B+树有什么异同之处呢?
LSM-Tree的设计思路是,将数据拆分为几百M大小的Segments,并是顺序写入。
B+Tree则是将数据拆分为固定大小的Block或Page, 一般是4KB大小,和磁盘一个扇区的大小对应,Page是读写的最小单位。
在数据的更新和删除方面,B+Tree可以做到原地更新和删除,这种方式对数据库事务支持更加友好,因为一个key只会出现一个Page页里面,但由于LSM-Tree只能追加写,并且在L0层key的rang会重叠,所以对事务支持较弱,只能在Segment Compaction的时候进行真正地更新和删除。
因此LSM-Tree的优点是支持高吞吐的写(可认为是O(1)),这个特点在分布式系统上更为看重,当然针对读取普通的LSM-Tree结构,读取是O(N)的复杂度,在使用索引或者缓存优化后的也可以达到O(logN)的复杂度。
而B+tree的优点是支持高效的读(稳定的OlogN),但是在大规模的写请求下(复杂度O(LogN)),效率会变得比较低,因为随着insert的操作,为了维护B+树结构,节点会不断的分裂和合并。操作磁盘的随机读写概率会变大,故导致性能降低。
还有一点需要提到的是基于LSM-Tree分层存储能够做到写的高吞吐,带来的副作用是整个系统必须频繁的进行compaction,写入量越大,Compaction的过程越频繁。而compaction是一个compare & merge的过程,非常消耗CPU和存储IO,在高吞吐的写入情形下,大量的compaction操作占用大量系统资源,必然带来整个系统性能断崖式下跌,对应用系统产生巨大影响,当然我们可以禁用自动Major Compaction,在每天系统低峰期定期触发合并,来避免这个问题。
讲LSM树之前,需要提下三种基本的存储引擎,这样才能清楚LSM树的由来:
1. 哈希存储引擎 是哈希表的持久化实现,支持增、删、改以及随机读取操作,但不支持顺序扫描,对应的存储系统为key-value存储系统。对于key-value的插入以及查询,哈希表的复杂度都是O(1),明显比树的操作O(n)快,如果不需要有序的遍历数据,哈希表就是最优的选择。
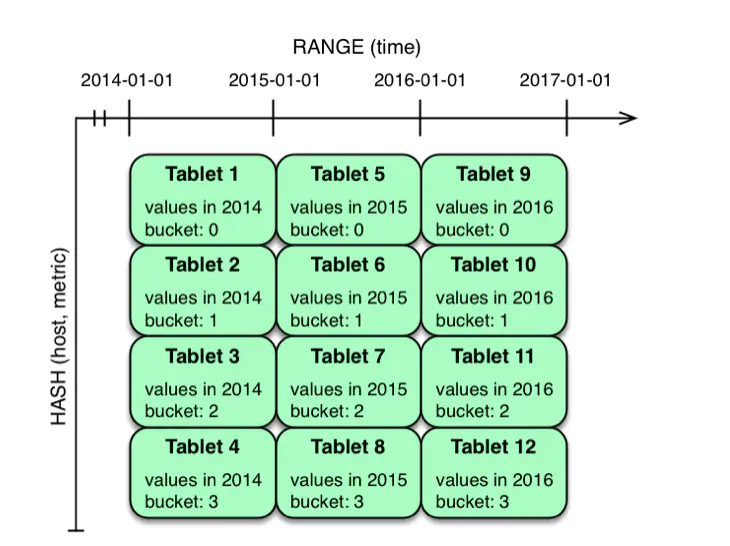
采用hash存储的有kudu的hash分区,这样可以把key相同的数据放到同一个分区。
2. B树存储引擎是B树的持久化实现,不仅支持单条记录的增、删、读、改操作,还支持顺序扫描(B+树的叶子节点之间的指针),对应的存储系统就是关系数据库(Mysql等)。
3. LSM树(Log-Structured Merge Tree)存储引擎和B树存储引擎一样,同样支持增、删、读、改、顺序扫描操作。而且通过批量存储技术规避磁盘随机写入问题。当然凡事有利有弊,LSM树和B+树相比,LSM树牺牲了部分读性能,用来大幅提高写性能。
阿里为了优化这个问题,在X-DB引入了异构硬件设备FPGA来代替CPU完成compaction操作,使系统整体性能维持在高水位并避免抖动,是存储引擎得以服务业务苛刻要求的关键。
6. 总结
本文主要介绍了LSM-Tree的相关内容,简单的说,其牺牲了部分读取的性能,通过批量顺序写来换取了高吞吐的写性能,这种特性在大数据领域得到充分了体现,最直接的例子就各种NoSQL在大数据领域的应用,学习和了解LSM-Tree的结构将有助于我们更加深入的去理解相关NoSQL数据库的实现原理,掌握隐藏在这些框架下面的核心知识。